

Desde el punto de vista del diseño de CEM, el problema aparece cuando se aplican reglas de diseño aceptables en las TCI diseñadas en los años 70 en tarjetas que usan CI de alta velocidad actuales. Muchas veces se “heredan” y se asumen como válidas reglas que eran correctas hace 45 años pero hoy no se justifican y llevan a diseñar incorrectamente las TCI actuales. Ello es debido a que se asumen como válidas reglas de diseño sin analizar en detalle si todavía es válido aplicarlas en las TCI con tecnología actual.
Las reglas de diseño de CEM que seguidamente se presentan usualmente se aplican pensando que son buenas reglas, pero en cambio son reglas demasiado vagas, o no se aplican adecuadamente o simplemente están equivocadas. Estas reglas se aplican a las TCI y a los equipos completos en general. El segundo grupo de reglas son algunas de las peores reglas de CEM que no se deben aplicar. … (Leer más)
En los años 70 se diseñaban equipos electrónicos usando mayoritariamente tarjetas de circuitos impresos (TCI) bicapa con circuitos integrados (CI) de baja frecuencia (Intel 8080, f = 2 MHz, primer PC f = 4,77 MHz). En aquellos años, el concepto de compatibilidad electromagnética (CEM) prácticamente no era conocido. Se hablaba de interferencias de radiofrecuencia (RFI) en lugar de interferencias electromagnéticas (EMI). La primera Directiva de CEM, 89/336/CEE entró en vigor en 1989, ya hace 28 años. En este tiempo se publicaron la segunda Directiva de CEM 2004/108/CE y la tercera y actual 2014/30/UE, en vigor desde abril de 2016. Hoy en día se diseña con TCI multicapa con CI de alta frecuencia (f ≈ 3 GHz). Entre los 2 MHz y los 3 GHz hay una amplia gama de frecuencias de reloj del microcontrolador para escoger, dependiendo de la aplicación.
La experiencia de diseño se transmite a través de la formación académica en las universidades y también a través de la experiencia laboral. Los diseñadores tendemos a usar reglas de diseño que se van transmitiendo entre los ingenieros sénior y los ingenieros junior como reglas prácticas que, en teoría, facilitan el proceso del diseño electrónico. Desde el punto de vista del diseño de CEM, el problema aparece cuando se aplican, hoy en día reglas de diseño aceptables en las TCI diseñadas en los años 70, en tarjetas que usan CI de alta velocidad actuales. Muchas veces se “heredan” y se asumen como válidas, reglas que eran correctas hace 45 años pero hoy no se justifican y llevan a diseñar incorrectamente las TCI actuales. Ello es debido a que se aplican reglas de diseño sin analizar en detalle si todavía es válido aplicarlas en las TCI con tecnología actual.
Los ingenieros electrónicos y los diseñadores de TCI dependen, tal vez demasiado, de algunas reglas desfasadas al diseñar TCI o diagnosticar problemas de CEM. Por desgracia, hay demasiadas reglas de diseño y cada uno tiene las suyas. Algunas reglas se basan en modelos de circuitos o de radiación, otras se basan en la experiencia y otras no tienen origen conocido. Algunas pautas son muy importantes y casi siempre se pueden aplicar. Otras sólo se aplican en situaciones específicas y no son apropiadas en general. Es importante que un ingeniero de diseño sea capaz de reconocer qué reglas deben cumplirse absolutamente y cuáles son menos importantes para cualquier aplicación dada. En lugar de confiar en las reglas generales de diseño, es preferible un enfoque más sistemático que relacione los requisitos de CEM con los criterios de diseño. Uno de estos enfoques es el diseño para el cumplimiento de las normas de CEM.
Para ayudar a aclarar algunas reglas confusas, se explican algunas de ellas. Las reglas de diseño de CEM que seguidamente se presentan, usualmente se aplican pensando que son buenas reglas, pero en cambio son reglas demasiado vagas, o no se aplican adecuadamente o simplemente están equivocadas. Estas reglas se aplican a las TCI y a los equipos completos en general. El segundo grupo de reglas son algunas de las peores reglas de CEM que nunca se deben aplicar.
REGLAS DÉBILES DE CEM
- Un plano de masa debe llenar completamente el área debajo de cada componente sin huecos, excepto donde sea necesario para agujeros pasantes: Ésta es generalmente una buena idea, pero hay muchas situaciones en las que es bueno trazar el plano de masa bajo un componente o un área particular de la TCI (por ejemplo, en algunos transformadores, bobinas o circuitos de alimentación). A veces, seguir ciegamente esta guía puede resultar en problemas significativos de CEM.
- Por encima de los 25 MHz, todas las TCI deben tener dos planos de masa: No siempre es necesario. Hoy en día muchas TCI perfectamente correctas operan a frecuencias de GHz con un solo plano de masa. El número de planos de masa requeridos depende de muchos factores (por ejemplo, el número de pistas y sus corrientes, el número total de capas, los tiempos de conmutación).
- En TCI con múltiples planos de masa, usar vías de masa alrededor del perímetro de la TCI cada 2 cm para formar una jaula de Faraday: En la mayoría de las TCI con dos o más planos de masa, hay bastantes conexiones naturales de vías para hacer esta guía innecesaria. En las TCI que no tienen suficientes conexiones de masa con vías naturales, la colocación de las vías alrededor del borde exterior de la TCI puede crear una cavidad resonante en la que conviene calcular sus frecuencias resonantes. Si estas frecuencias resonantes pueden provocar un problema, es mejor distribuir estas conexiones a través de la TCI, en lugar de colocarlas todas cerca del borde.
- No debe haber ninguna isla de cobre flotante de ningún tipo en una TCI: Generalmente es una buena regla, pero intentar conectar a masa cada isla de cobre, sin importar cuán insignificantemente pequeña pueda ser podría ser peor. Es importante tener un juicio equilibrado y determinar si para una pequeña isla flotante (por ejemplo, un disipador de calor eléctricamente pequeño) realmente vale la pena el esfuerzo de conectarla a masa. Una mala conexión a masa puede aumentar el tamaño eléctrico del metal flotante y crear un problema que no habría existido de otra manera.
- Debe colocarse debajo de todos los CI grandes una "isla" de masa sólida: Trazar islas de cobre conectadas a masa, en general, es una mala idea. Si la isla de masa está en una capa por encima o por debajo de un plano de masa sólido, podría servir a un propósito útil en algunas situaciones raras, pero esto no debe considerarse una buena regla de diseño CEM. El plano de masa sólido ya ejerce suficientemente de plano de referencia.
- Se deben utilizar condensadores cerámicos de alta frecuencia y baja inductancia para el desacoplamiento de los CI en cada pareja de patillas de alimentación. Utilizar 100 nF hasta los 15 MHz, y 10 nF por encima de los 15 MHz: Es una regla totalmente incorrecta. El valor del condensador al lado de cada alimentación en un CI debe asegurar que su frecuencia de resonancia sea mayor que el ancho de banda de las señales del CI. Frecuencia de resonancia: fr = 1 / 2π (LC)1/2. El ancho de banda de las señales depende de los tiempos de conmutación de la señal (tr y tf), no de su frecuencia fundamental. Usualmente se tiende a hablar incorrectamente de la frecuencia fundamental del reloj (aquí los 15 MHz referenciados). En CEM es mucho más importante considerar el ancho de banda, que depende de los tiempos tr y tf y no de la frecuencia fundamental.
- Utilizar la tecnología de menor tensión de alimentación y mayor lentitud que satisfaga los requisitos del circuito: No es una mala regla, pero confiar en la lentitud de una tecnología de CI no es práctico. La reducción de la tensión de alimentación reduce el margen de ruido. Actualmente todas las tecnologías usadas en los CI tienen tiempos de conmutación muy rápidos. Ello nos obliga a cuidar el diseño para evitar problemas de CEM.
- Debe añadirse una resistencia en serie a la salida de los “drivers” con una velocidad de conmutación superior a 1V/ns: Si se necesita o no agregar una resistencia en serie en la salida de un “driver” o puerto de salida de señal depende de varios parámetros pero, en términos generales, la velocidad de conmutación no es uno de ellos.
- Se deben usar pistas de guarda para aislar las pistas de alta velocidad de las pistas de E / S: Las pistas de guarda son útiles. Pero a menudo no son útiles para justificar ser una regla de diseño. Es recomendable no usar pistas de guarda, a menos que exista un problema específico conocido a solucionar.
- Todas las pistas de alimentación y masa deben tener tres veces el ancho nominal de la pista de señal: No es una mala regla, pero no siempre es necesaria o suficiente. La anchura de las pistas de alimentación y masa no depende de la anchura de las pistas de señal. Es mejor aplicar la regla siguiente: todas las pistas de alimentación y masa deben tener como mínimo una anchura de 1 mm cuando no se usen planos.
- Las TCI y los recintos metálicos deben diseñarse de manera que sus resonancias no coincidan con los armónicos de las frecuencias del reloj del microcontrolador del sistema: Teóricamente, es una buena regla. En la práctica, no es razonable esperar que un diseñador controle todos los parámetros que afectan a las frecuencias resonantes de las TCI o los recintos metálicos (cajas). Si se intenta hacerlo se podría gastar demasiado tiempo y podría comprometer la integridad del diseño en algún caso.
- Un blindaje debe encerrar completamente la electrónica eliminando cualquier penetración tal como agujeros, costuras, ranuras o cables: Esta regla no indica que hay cuatro categorías de blindaje: blindaje de campo eléctrico, blindaje de campo magnético de baja frecuencia, blindaje de campo magnético de alta frecuencia y recintos blindados (cajas). La regla anterior sólo se aplicaría a los recintos blindados. Los agujeros, las costuras, las ranuras y las penetraciones de cables son generalmente elementos esenciales de cualquier recinto metálico real. Eliminarlos no es una opción, por lo que esta guía no es especialmente útil. Además, la mayoría de los blindajes en los productos comerciales son blindajes de campo eléctrico. Estos blindajes pueden ser efectivos, incluso con agujeros, costuras, ranuras y penetraciones de cables, si se diseñan adecuadamente.
- Cada blindaje debe tener una conexión de baja impedancia a masa en al menos dos lugares para evitar que su potencial de ruido se acople a la TCI protegida: Si se usa más de un blindaje en el producto, es probable que los blindajes sean de campo eléctrico. El lugar donde los blindajes de campo eléctrico se conectan a masa es crítico. La doble conexión podría establecer un indeseado bucle de corriente que podría ser un emisor o un receptor de EMI. Esta regla es un mal consejo. Lo mejor es conectar todos los blindajes en un único punto “en estrella” de masa.
ALGUNAS DE LAS PEORES REGLAS DE CEM
- Los circuitos de una TCI deben agruparse por tipo con la fuente de alimentación más cercana al conector y los circuitos digitales de alta velocidad más alejados del conector de E/S:
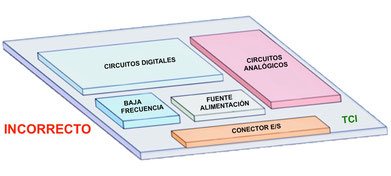
Esta guía de diseño (o variantes que indiquen otras agrupaciones) es probablemente responsable de los peores diseños de TCI. Ignora la idea fundamental de que diferentes TCI tienen diferentes funciones. Es importante considerar la función y la velocidad de los componentes al decidir dónde colocarlos en la TCI. Sin embargo, cualquier regla generalista sobre su localización en relación al conector es más probable que produzca un mal diseño que uno bueno. Normalmente, pero no siempre, es una buena idea poner los componentes de los circuitos digitales, que envían y reciben señales de alta velocidad, a través del conector de E/S y alimentación, más cercanos al conector.
- Los planos de masa sólidos deben separarse entre circuitos analógicos y digitales: Ésta es probablemente la segunda peor regla de diseño de CEM. Hay algunas (muy pocas) situaciones en las que la separación de un plano de masa entre circuitos analógicos y digitales es una buena regla de CEM. Estas situaciones están siempre relacionadas con la necesidad de mantener las corrientes de baja frecuencia (f < 100 kHz) producidas por un circuito ruidoso que comparte la misma pista de retorno que las corrientes en un circuito que es sensible a las corrientes de aproximadamente 3 órdenes de magnitud más bajas. Desafortunadamente, separar un plano de masa sólido puede causar enormes problemas al interferir con el flujo de corrientes de alta frecuencia y al generar tensiones que finalmente provocan problemas de emisión radiada. En muchos casos, dejar el plano sólido y dejar que ambos circuitos compartan el plano de masa es correcto. En situaciones donde se requiere un aislamiento de baja frecuencia, es casi siempre mejor proporcionar rutas de retorno separadas para estos circuitos. Esto se logra generalmente utilizando una pista o un plano en una capa diferente.
- El plano de masa debajo del conector de E/S debe estar separado del plano de masa digital con un punto de conexión entre ellos: Esta regla no era irrazonable hace 40 años, cuando la mayoría de las TCI tenían dos capas, eran menos densas y funcionaban a baja velocidad. Sin embargo, hoy en día esto es generalmente uno de los peores diseños de un plano de masa. Generalmente, el objetivo debe ser lograr una conexión de baja impedancia entre el recinto blindado (caja) y la masa digital a las frecuencias de emisiones radiadas (por encima de 30 MHz) y controlar el flujo de cualquier corriente de baja frecuencia (por ejemplo f < 100 kHz) aislando el recinto de la masa digital a bajas frecuencias. La regla propuesta hace lo contrario de esto.

Como resultado, los productos que emplean este diseño, por lo general tienen un montón de condensadores de puente entre la masa del área digital y la masa de E/S conectada con el chasis o recinto metálico. Esto efectivamente forma un filtro “notch” de valor cuestionable. El aislamiento de baja frecuencia y la unión a alta frecuencia se logran mucho mejor colocando la masa de E/S en una capa separada y superponiéndola con la masa digital. Esto permite establecer una buena conexión de alta frecuencia entre ellos utilizando varios condensadores MLCC de baja inductancia. Se puede realizar una conexión de baja frecuencia entre la masa digital y la masa de E/S en un punto único. La regla general de que un plano sólido de masa nunca debe dividirse se debe aplicar aquí. Si se debe evitar trazar el plano de masa en un área particular (por ejemplo, debajo de choques en modo común, inversores de potencia o para aislamiento de alta tensión) es a menudo correcto. Sin embargo, dividir o agujerear un plano de masa en general es casi siempre una mala idea.
- Deben utilizarse las masas de simple punto en circuitos de baja frecuencia: Las masas multipunto deben utilizarse circuitos de alta frecuencia. El sentido subyacente de esta regla no es necesariamente incorrecto. Los diseñadores de sistemas que no entienden la diferencia entre la “masa” y el “retorno de corriente” utilizan esta regla para justificar algunos diseños incorrectos. A bajas frecuencias, no queremos que todas las corrientes de retorno fluyan a través de un solo punto.

Sin embargo, eso es precisamente lo que sucede cuando las personas intentan ciegamente aplicar esta regla. En términos generales, queremos controlar el flujo de las corrientes de baja frecuencia limitando las opciones. Controlamos el flujo de corrientes de alta frecuencia proporcionando una buena opción. La aplicación de los conceptos de simple punto y multipunto depende de la frecuencia. Para frecuencias inferiores a 1 MHz es mejor usar una masa de simple punto. Entre 1 y 10 MHz, usar una masa de simple punto cuando la longitud conductor < λ/20 y usar una masa multipunto si la longitud conductor > λ/20. Usar siempre masa multipunto para f > 10 MHz.
- Proporcionar una conexión de masa entre la caja metálica y el reloj-oscilador: Esta regla es incorrecta. Si en el diseño se intenta mantener las corrientes del chasis lejos del plano de masa digital empleando una conexión de simple punto, entonces esta conexión debe estar a lo largo del borde donde se encuentran los conectores de E/S. Normalmente, los relojes y los osciladores se mantienen fuera de esta área; Al hacer una conexión cerca del reloj-oscilador destruiría la naturaleza de la masa de simple punto. Incluso si no se intenta controlar las corrientes de baja frecuencia, no hay generalmente ninguna buena razón para tratar de hacer una conexión entre la masa digital y la masa de la caja cerca del reloj-oscilador.
- Todas las pistas más largas de λ/4 de la frecuencia más alta de interés deben terminarse con una resistencia igualada a su impedancia característica de la pista: Esto no es una regla de diseño controvertida, pero hace que muchos diseñadores hagan diseños incorrectos en muchas situaciones. En términos generales, es mejor relacionar el retardo de propagación de la pista con el tiempo de subida tr de la señal. Si el retardo de propagación es mayor que el tiempo de subida (tr ≤ 4 tPD), es cuando se debe aplicar una terminación coincidente con la impedancia de la pista. Normalmente es difícil definir la "mayor frecuencia de interés", mientras que el retardo de propagación tPD y el tiempo de subida tr son más fáciles de determinar. Sin embargo, nuestro primer impulso no debe ser igualar las impedancias. La mejor solución es reducir la longitud de la pista, si es posible. Las terminaciones coincidentes realmente aumentan la corriente de consumo. A menos que se diseñe TCI digitales de muy alta velocidad, o se usen líneas de comunicación de alta velocidad (USB, SERDES, etc) o TCI muy grandes, pocas pistas (si las hubiere) requerirán una terminación.
- Las pistas no deben girar con ángulo recto: Nadie parece saber con certeza dónde se originó esta regla. Los ingenieros de CEM a menudo dicen que es un problema de fabricación. Los fabricantes de TCI dicen que es un problema de CEM. El biselado de la esquina en una pista controlando su impedancia puede ser una buena idea a velocidades de Gbps. Sin embargo, generalmente no hay ventaja para hacer dos vueltas de 45 grados en lugar de hacer un giro de 90 grados.
- Los bordes del plano de alimentación no deben estar alineados con los bordes de los planos de masa. Deben ser arrastrados hacia dentro a una distancia de 20 veces el espacio entre los dos planos (es la llamada regla 20-H): Aunque es posible pensar en situaciones en las que, hacer que los planos de alimentación sean ligeramente más pequeños que los planos de masa, podría ser una buena idea, rara vez es necesario aplicar esta regla. Hacer que el plano de alimentación sea más pequeño que el plano de masa no reduce la radiación de los planos a menos que el plano de alimentación esté emparedado entre dos planos de masa. Los planos de alimentación intercalados entre dos planos de masa no es probable que provoquen un problema de interferencias radiadas, incluso si los planos de alimentación son del mismo tamaño que los planos de masa. Si hay un deseo de reducir el campo radiado en el borde de la TCI, con aplicar la regla 2-H o 3-H es generalmente suficiente.
CONCLUSIONES
El buen diseño electromagnético de una TCI no necesita cumplir con tantas reglas de diseño como sea posible. Es mucho más importante cumplir con las pocas reglas que sean críticas en la aplicación. Es importante reunir a las personas adecuadas desde el inicio del nuevo desarrollo. El ingeniero de CEM puede proporcionar asesoramiento sobre aspectos críticos del diseño y recomendar las reglas de CEM que sean apropiadas aplicar en el nuevo equipo para "hacer las cosas bien", antes de que muchas decisiones de diseño sean irreversibles.
Member of Agency for Qualification of Professional Engineers


cemdal consultoria compatibilidad electromagnética asesoria CEM EMC EMI Francesc Daura problemas CEM
Escribir comentario
Santiago Frías (martes, 18 abril 2017 08:35)
Otro acierto de artículo, sobre todo el apartado de "algunas de las peores reglas de CEM". Felicitaciones.